Where does search show up?

\( \lor (\neg e) \)
What is a search problem?
Five components:
- States
- Initial state
- Goal test
- Successor function
- Cost (optional)
Solution = path from start to goal.
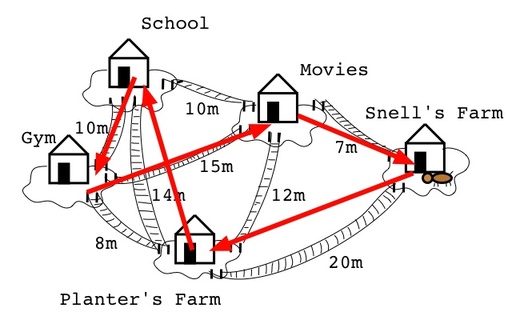
Search graph
- States → nodes
- Actions → edges
- Goal: find a path S → G
Search tree & frontier
- Don't enumerate the graph
- Grow a tree from S, one path at a time
- Frontier = paths to expand next
Example: 8-puzzle
- State: 9 positions,
0= empty - Initial:
530,876,241 - Goal:
123,456,780 - Successor: slide adjacent tile into empty
- Cost: 1 per move
181,440 reachable states — too many to enumerate.
Quick check: successors
Q. Which is a successor of 530,876,241?
6 up.
Same 8-puzzle, different state
9 cells, 0–8
\((x_2, y_2), \ldots, (x_8, y_8)\)
9 (x,y) pairs — ~2× the space
Successor swaps empty tile's coords with a neighbour's.
Generic search algorithm
// Inputs: graph, start node s, goal test goal(n) function Search(graph, s, goal): frontier ← { <s> } while frontier is not empty: select and remove a path <n0, …, nk> from frontier if goal(nk): return <n0, …, nk> for each neighbour n of nk: add <n0, …, nk, n> to frontier return “no solution”
Trace: DFS
Push children alphabetically. Step numbers = order of expansion.
Tree parameters: \(b\), \(m\), \(d\)
\(b\) — branching factor
\(d\) — depth of shallowest goal
\(m\) — max depth of tree
DFS — properties
| Space | \(O(bm)\) |
|---|---|
| Time | \(O(b^m)\) |
| Complete? | No |
| Optimal? | No |
When to use DFS
Good fit
- Memory limited
- Many goals exist
- Deep solutions
Bad fit
- Cycles
- Shallow solutions
- Need optimality
Trace: BFS
Pop the oldest path. Step number = order of expansion. Multiple paths to P and B.
BFS — properties
| Space | \(O(b^d)\) |
|---|---|
| Time | \(O(b^d)\) |
| Complete? | Yes |
| Optimal? | Shallowest goal |
When to use BFS
Good fit
- Memory plentiful
- Want fewest arcs
- Cycles possible
Bad fit
- Deep solutions
- Large branching
- Graph generated on the fly
What if edges have different costs?
S→A→G: cost 11. S→B→G: cost 6.
BFS picks the wrong one (it's fewer hops, but pricier).
Uniform-cost search (UCS)
- Frontier = priority queue
- Key = path cost so far
- Pop the cheapest path first
Complete + optimal when all costs are positive.
When every edge has cost 1, UCS = BFS. (We'll use BFS in this lecture for that reason.)
BFS vs DFS — Q1
Q. Memory is very limited.
BFS vs DFS — Q2
Q. All solutions are deep in the search tree.
BFS vs DFS — Q3
Q. The graph contains cycles.
BFS vs DFS — Q4
Q. The branching factor is huge or infinite.
BFS vs DFS — Q5
Q. You must find the shallowest goal.
BFS vs DFS — Q6
Q. All solutions are very shallow.
Why \(O(b^d)\) matters
Branching factor \(b = 10\), 1 state = 8 bytes, computer doing 109 states/sec.
| Depth \(d\) | States \(b^d\) | BFS memory | Wall-clock time |
|---|---|---|---|
| 4 | 104 | 80 KB | 10 µs |
| 8 | 108 | 800 MB | 0.1 s |
| 12 | 1012 | 8 TB | ~17 min |
| 16 | 1016 | 80 PB | ~4 months |
| 20 | 1020 | 800 EB | ~3000 years |
Doubling \(d\) doesn't make the problem twice as hard. It makes it 10,000× harder.
Trace: IDS
Same graph as BFS. Each iteration is depth-limited DFS.
IDS — properties
| Space | \(O(bd)\) |
|---|---|
| Time | \(O(b^d)\) |
| Complete? | Yes |
| Optimal? | Shallowest goal |
Summary: DFS vs BFS vs IDS
| DFS | BFS | IDS | |
|---|---|---|---|
| Frontier | Stack (LIFO) | Queue (FIFO) | Stack, repeated at deeper limits |
| Space | \(O(bm)\) | \(O(b^d)\) | \(O(bd)\) |
| Time | \(O(b^m)\) | \(O(b^d)\) | \(O(b^d)\) |
| Complete? | No | Yes | Yes |
| Optimal? | No | Shallowest goal | Shallowest goal |
\(b\) = branching factor; \(m\) = max depth of the search tree; \(d\) = depth of the shallowest goal.
DFS vs BFS: exploration order
Animations by Mre, Wikimedia Commons (CC BY-SA 3.0).
Next: informed search
Use a heuristic \(h(n)\) — an estimate of distance to the goal — to bias the search.
A* combines path cost so far (\(g(n)\)) with heuristic (\(h(n)\)) — provably optimal under mild conditions.